We have completed our hardware test. It seems the signal output of TC358746 CSI Tx mode is ok based on our test.
We built up our driver based on the source code from OV5693, we made some modification.
Please see attached V4L2 error report for error from V4L2 driver. We used the following command line:
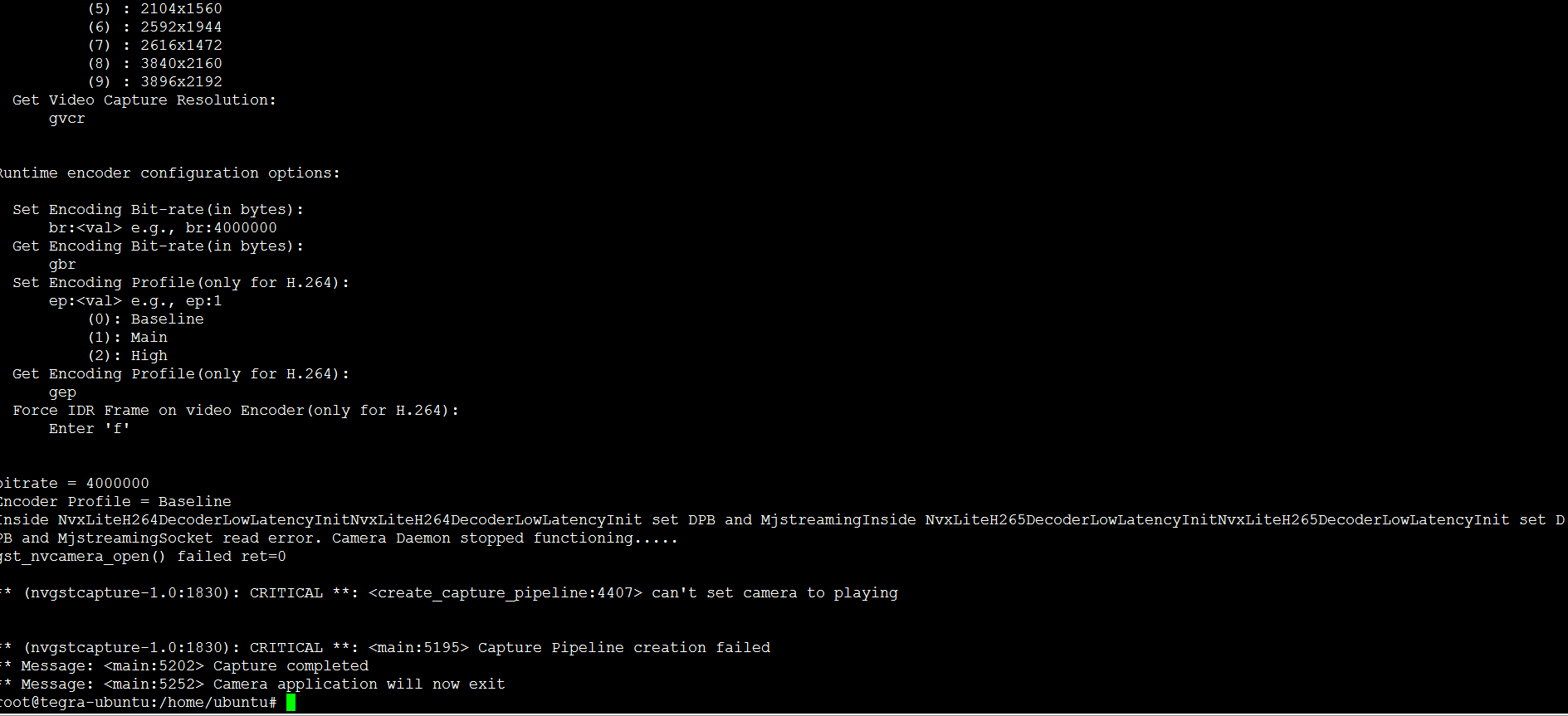
Please see attached nvgstcapture-1.0error1 and nvgstcapture-1.0error2 for errors found under nvgstcapture-1.0 command.
Device tree
#include <dt-bindings/media/camera.h>
#include <dt-bindings/platform/t210/t210.h>
#define CAM0_RST_L TEGRA_GPIO(S, 4)
#define CAM0_PWDN TEGRA_GPIO(S, 7)
#define CAM1_RST_L TEGRA_GPIO(S, 5)
#define CAM1_PWDN TEGRA_GPIO(T, 0)
/ {
host1x {
vi {
num-channels = <6>;
ports {
#address-cells = <1>;
#size-cells = <0>;
status = "okay";
vi_port0: port@0 {
status = "okay";
reg = <0x0>;
vi_in0: endpoint {
status = "okay";
csi-port = <0>;
bus-width = <2>;
remote-endpoint = <&ov5693_out1>;
};
};
vi_port1: port@1 {
status = "okay";
reg = <0x1>;
vi_in1: endpoint {
status = "okay";
csi-port = <1>;
bus-width = <2>;
remote-endpoint = <&ov5693_out2>;
};
};
vi_port2: port@2 {
status = "okay";
reg = <0x2>;
vi_in2: endpoint {
status = "okay";
csi-port = <2>;
bus-width = <2>;
remote-endpoint = <&ov5693_out3>;
};
};
vi_port3: port@3 {
status = "okay";
reg = <0x3>;
vi_in3: endpoint {
status = "okay";
csi-port = <3>;
bus-width = <2>;
remote-endpoint = <&ov5693_out4>;
};
};
vi_port4: port@4 {
status = "okay";
reg = <0x4>;
vi_in4: endpoint {
status = "okay";
csi-port = <4>;
bus-width = <2>;
remote-endpoint = <&ov5693_out5>;
};
};
vi_port5: port@5 {
status = "okay";
reg = <0x5>;
vi_in5: endpoint {
status = "okay";
csi-port = <5>;
bus-width = <2>;
remote-endpoint = <&ov5693_out6>;
};
};
};
};
i2c@546c0000 {
status = "okay";
#address-cells = <1>;
#size-cells = <0>;
ov5693_p@e {
//compatible="nvidia,tc358746a";
compatible="nvidia,ov5693";
reset-gpios = <&gpio CAM0_RST_L GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio CAM0_PWDN GPIO_ACTIVE_HIGH>;
vana-supply = <&en_vdd_cam_hv_2v8>;
vif-supply = <&en_vdd_cam>;
has-eeprom = <1>;
avdd-reg = "vana";
sensor_model ="ov5693";
iovdd-reg = "vif";
post_crop_frame_drop = "0";
status = "okay";
reg = <0xe>;
devnode = "video0";
physical_w = "3.674";
physical_h = "2.738";
clocks = <&tegra_car TEGRA210_CLK_ID_CLK_OUT_3>;
clock-names = "mclk";
clock-frequency = <24000000>;
mclk = "cam_mclk1";
mode0 {
mclk_khz = "24000";
num_lanes = "2";
tegra_sinterface = "serial_a";
discontinuous_clk = "yes";
dpcm_enable = "false";
cil_settletime = "0";
active_w = "1077";
active_h = "788";
pixel_t = "bayer_bggr";
readout_orientation = "90";
line_length = "1920";
inherent_gain = "1";
mclk_multiplier = "6.67";
pix_clk_hz = "160000000";
min_gain_val = "1.0";
max_gain_val = "16";
min_hdr_ratio = "1";
max_hdr_ratio = "64";
min_framerate = "1.816577";
max_framerate = "30";
min_exp_time = "34";
max_exp_time = "550385";
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ov5693_out1: endpoint {
csi-port = <0>;
bus-width = <2>;
remote-endpoint = <&vi_in0>;
};
};
};
};
};
};
i2c@7000c400 {
status = "okay";
#address-cells = <1>;
#size-cells = <0>;
tca9548@70 {
compatible = "nxp,pca9548";
reg = <0x70>;
#address-cells = <1>;
#size-cells = <0>;
vcc-supply = <&en_vdd_cam>;
skip_mux_detect;
i2c@0 {
reg = <0>;
i2c-mux,deselect-on-exit;
#address-cells = <1>;
#size-cells = <0>;
ov5640_p@48 {
//compatible="nvidia,tc358746a";
reset-gpios = <&gpio CAM0_RST_L GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio CAM0_PWDN GPIO_ACTIVE_HIGH>;
vana-supply = <&en_vdd_cam_hv_2v8>;
vif-supply = <&en_vdd_cam>;
has-eeprom = <1>;
avdd-reg = "vana";
sensor_model ="ov5693";
iovdd-reg = "vif";
post_crop_frame_drop = "0";
status = "okay";
reg = <0x48>;
devnode = "video1";
physical_w = "3.674";
physical_h = "2.738";
clocks = <&tegra_car TEGRA210_CLK_ID_CLK_OUT_3>;
clock-names = "mclk";
clock-frequency = <24000000>;
mclk = "cam_mclk1";
mode0 {
mclk_khz = "24000";
num_lanes = "2";
tegra_sinterface = "serial_b";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
//active_w = "2592";
active_w = "1024";
//active_h = "1944";
active_h = "768";
pixel_t = "bayer_bggr";
readout_orientation = "90";
line_length = "1024";
inherent_gain = "1";
//mclk_multiplier = "1.41";
mclk_multiplier = "6.67";
pix_clk_hz = "160000000";
//pix_clk_hz = "33750000";
min_gain_val = "1.0";
max_gain_val = "16";
min_hdr_ratio = "1";
max_hdr_ratio = "64";
min_framerate = "1.816577";
max_framerate = "30";
min_exp_time = "34";
max_exp_time = "550385";
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ov5693_out2: endpoint {
csi-port = <1>;
bus-width = <2>;
remote-endpoint = <&vi_in1>;
};
};
};
};
};
i2c@1 {
reg = <1>;
i2c-mux,deselect-on-exit;
#address-cells = <1>;
#size-cells = <0>;
ov5640_a@49 {
//compatible="nvidia,ov5693";
//compatible="nvidia,tc358746a";
reset-gpios = <&gpio CAM0_RST_L GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio CAM0_PWDN GPIO_ACTIVE_HIGH>;
vana-supply = <&en_vdd_cam_hv_2v8>;
vif-supply = <&en_vdd_cam>;
has-eeprom = <1>;
avdd-reg = "vana";
sensor_model ="ov5693";
iovdd-reg = "vif";
post_crop_frame_drop = "0";
status = "okay";
reg = <0x49>;
devnode = "video2";
physical_w = "3.674";
physical_h = "2.738";
clocks = <&tegra_car TEGRA210_CLK_ID_CLK_OUT_3>;
clock-names = "mclk";
clock-frequency = <24000000>;
mclk = "cam_mclk1";
mode0 {
mclk_khz = "24000";
num_lanes = "2";
tegra_sinterface = "serial_c";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
active_w = "2592";
active_h = "1944";
pixel_t = "bayer_bggr";
readout_orientation = "90";
line_length = "2688";
inherent_gain = "1";
mclk_multiplier = "6.67";
pix_clk_hz = "160000000";
min_gain_val = "1.0";
max_gain_val = "16";
min_hdr_ratio = "1";
max_hdr_ratio = "64";
min_framerate = "1.816577";
max_framerate = "30";
min_exp_time = "34";
max_exp_time = "550385";
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ov5693_out3: endpoint {
csi-port = <2>;
bus-width = <2>;
remote-endpoint = <&vi_in2>;
};
};
};
};
};
i2c@2 {
reg = <2>;
i2c-mux,deselect-on-exit;
#address-cells = <1>;
#size-cells = <0>;
ov5640_b@4a {
//compatible="nvidia,ov5693";
//compatible="nvidia,tc358746a";
reset-gpios = <&gpio CAM0_RST_L GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio CAM0_PWDN GPIO_ACTIVE_HIGH>;
vana-supply = <&en_vdd_cam_hv_2v8>;
vif-supply = <&en_vdd_cam>;
has-eeprom = <1>;
avdd-reg = "vana";
sensor_model ="ov5693";
iovdd-reg = "vif";
post_crop_frame_drop = "0";
status = "okay";
reg = <0x4a>;
devnode = "video3";
physical_w = "3.674";
physical_h = "2.738";
clocks = <&tegra_car TEGRA210_CLK_ID_CLK_OUT_3>;
clock-names = "mclk";
clock-frequency = <24000000>;
mclk = "cam_mclk1";
mode0 {
mclk_khz = "24000";
num_lanes = "2";
tegra_sinterface = "serial_d";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
active_w = "2592";
active_h = "1944";
pixel_t = "bayer_bggr";
readout_orientation = "90";
line_length = "2688";
inherent_gain = "1";
mclk_multiplier = "6.67";
pix_clk_hz = "160000000";
min_gain_val = "1.0";
max_gain_val = "16";
min_hdr_ratio = "1";
max_hdr_ratio = "64";
min_framerate = "1.816577";
max_framerate = "30";
min_exp_time = "34";
max_exp_time = "550385";
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ov5693_out4: endpoint {
csi-port = <3>;
bus-width = <2>;
remote-endpoint = <&vi_in3>;
};
};
};
};
};
i2c@3 {
reg = <3>;
i2c-mux,deselect-on-exit;
#address-cells = <1>;
#size-cells = <0>;
ov5640_c@4b {
//compatible="nvidia,ov5693";
//compatible="nvidia,tc358746a";
reset-gpios = <&gpio CAM0_RST_L GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio CAM0_PWDN GPIO_ACTIVE_HIGH>;
vana-supply = <&en_vdd_cam_hv_2v8>;
vif-supply = <&en_vdd_cam>;
has-eeprom = <1>;
avdd-reg = "vana";
sensor_model ="ov5693";
iovdd-reg = "vif";
post_crop_frame_drop = "0";
status = "okay";
reg = <0x4b>;
devnode = "video4";
physical_w = "3.674";
physical_h = "2.738";
clocks = <&tegra_car TEGRA210_CLK_ID_CLK_OUT_3>;
clock-names = "mclk";
clock-frequency = <24000000>;
mclk = "cam_mclk1";
mode0 {
mclk_khz = "24000";
num_lanes = "2";
tegra_sinterface = "serial_e";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
active_w = "2592";
active_h = "1944";
pixel_t = "bayer_bggr";
readout_orientation = "90";
line_length = "2688";
inherent_gain = "1";
mclk_multiplier = "6.67";
pix_clk_hz = "160000000";
min_gain_val = "1.0";
max_gain_val = "16";
min_hdr_ratio = "1";
max_hdr_ratio = "64";
min_framerate = "1.816577";
max_framerate = "30";
min_exp_time = "34";
max_exp_time = "550385";
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ov5693_out5: endpoint {
csi-port = <4>;
bus-width = <2>;
remote-endpoint = <&vi_in4>;
};
};
};
};
};
i2c@4 {
reg = <4>;
i2c-mux,deselect-on-exit;
#address-cells = <1>;
#size-cells = <0>;
ov5640_d@20 {
//compatible="nvidia,ov5693";
//compatible="nvidia,tc358746a";
reset-gpios = <&gpio CAM0_RST_L GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio CAM0_PWDN GPIO_ACTIVE_HIGH>;
vana-supply = <&en_vdd_cam_hv_2v8>;
vif-supply = <&en_vdd_cam>;
has-eeprom = <1>;
avdd-reg = "vana";
sensor_model ="ov5693";
iovdd-reg = "vif";
post_crop_frame_drop = "0";
status = "okay";
reg = <0x20>;
devnode = "video5";
physical_w = "3.674";
physical_h = "2.738";
clocks = <&tegra_car TEGRA210_CLK_ID_CLK_OUT_3>;
clock-names = "mclk";
clock-frequency = <24000000>;
mclk = "cam_mclk1";
mode0 {
mclk_khz = "24000";
num_lanes = "2";
tegra_sinterface = "serial_f";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
active_w = "2592";
active_h = "1944";
pixel_t = "bayer_bggr";
readout_orientation = "90";
line_length = "2688";
inherent_gain = "1";
mclk_multiplier = "6.67";
pix_clk_hz = "160000000";
min_gain_val = "1.0";
max_gain_val = "16";
min_hdr_ratio = "1";
max_hdr_ratio = "64";
min_framerate = "1.816577";
max_framerate = "30";
min_exp_time = "34";
max_exp_time = "550385";
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ov5693_out6: endpoint {
csi-port = <5>;
bus-width = <2>;
remote-endpoint = <&vi_in5>;
};
};
};
};
};
};
};
tegra-camera-platform {
compatible = "nvidia, tegra-camera-platform";
num_csi_lanes = <12>;
max_lane_speed = <1500000>;
min_bits_per_pixel = <8>;
vi_peak_byte_per_pixel = <2>;
vi_bw_margin_pct = <25>;
max_pixel_rate = <160000>;
isp_peak_byte_per_pixel = <2>;
isp_bw_margin_pct = <25>;
modules {
module0 {
status = "okay";
badge = "e3326_front_P5V27C";
position = "rear";
orientation = "1";
drivernode0 {
status = "okay";
pcl_id = "v4l2_sensor";
devname = "ov5640 6-000e";
proc-device-tree = "/proc/device-tree/host1x/i2c@546c0000/ov5693_p@e";
};
drivernode1 {
status = "disable";
pcl_id = "v4l2_focuser_stub";
proc-device-tree = "";
};
};
module1 {
status = "okay";
badge = "e3326_front_P5V27C";
position = "rear";
orientation = "1";
drivernode0 {
status = "okay";
pcl_id = "v4l2_sensor";
devname = "ov5640 7-0048";
proc-device-tree = "/proc/device-tree/i2c@7000c400/tca9548@70/i2c@0/ov5640_p@48";
};
drivernode1 {
status = "disable";
pcl_id = "v4l2_focuser_stub";
proc-device-tree = "";
};
};
module2 {
status = "okay";
badge = "e3326_front_P5V27C";
position = "rear";
orientation = "1";
drivernode0 {
status = "okay";
pcl_id = "v4l2_sensor";
devname = "ov5640 7-0049";
proc-device-tree = "/proc/device-tree/i2c@7000c400/tca9548@70/i2c@1/ov5640_a@49";
};
drivernode1 {
status = "disable";
pcl_id = "v4l2_focuser_stub";
proc-device-tree = "";
};
};
module3 {
status = "okay";
badge = "e3326_front_P5V27C";
position = "rear";
orientation = "1";
drivernode0 {
status = "okay";
pcl_id = "v4l2_sensor";
devname = "ov5640 7-004a";
proc-device-tree = "/proc/device-tree/i2c@7000c400/tca9548@70/i2c@2/ov5640_b@4a";
};
drivernode1 {
status = "disable";
pcl_id = "v4l2_focuser_stub";
proc-device-tree = "";
};
};
module4 {
status = "okay";
badge = "e3326_front_P5V27C";
position = "rear";
orientation = "1";
drivernode0 {
status = "okay";
pcl_id = "v4l2_sensor";
devname = "ov5640 7-004b";
proc-device-tree = "/proc/device-tree/i2c@7000c400/tca9548@70/i2c@3/ov5640_c@4b";
};
drivernode1 {
status = "disable";
pcl_id = "v4l2_focuser_stub";
proc-device-tree = "";
};
};
module5 {
status = "okay";
badge = "e3326_front_P5V27C";
position = "rear";
orientation = "1";
drivernode0 {
status = "okay";
pcl_id = "v4l2_sensor";
devname = "ov5640 7-0020";
proc-device-tree = "/proc/device-tree/i2c@7000c400/tca9548@70/i2c@4/ov5640_d@20";
};
drivernode1 {
status = "disable";
pcl_id = "v4l2_focuser_stub";
proc-device-tree = "";
};
};
};
};
gpio@6000d000 {
camera-control {
gpio-output-low = <
CAM0_RST_L
CAM0_PWDN
CAM1_RST_L
CAM1_PWDN
>;
};
};
};
oot@tegra-ubuntu:/home/ubuntu# v4l2-ctl -d /dev/video0 -w --verbose --set-fmt-video=width=1077,height=788,pixelformat=RGGB --set-ctrl bypass_mode=0 --stream-mmap --stream-count=1 --stream-to=test
Index : 1
Type : Video Capture
Flags : mapped, done, error
Field : None
Sequence : 1
Length : 857344
Bytesused: 857344
Timestamp: 0.18446744073434681118s (Monotonic, End-of-Frame)
Index : 2
Type : Video Capture
Flags : mapped, done, error
Field : None
Sequence : 2
Length : 857344
Bytesused: 857344
Timestamp: 0.18446744073434681118s (Monotonic, End-of-Frame)
root@tegra-ubuntu:/home/ubuntu# v4l2-compliance
Driver Info:
Compliance test for device /dev/video0 (not using libv4l2):
Required ioctls:
Allow for multiple opens:
Debug ioctls:
Input ioctls:
Output ioctls:
Input/Output configuration ioctls:
Test input 0:
Control ioctls:
test VIDIOC_QUERY_EXT_CTRL/QUERYMENU: OK
test VIDIOC_QUERYCTRL: OK
test VIDIOC_G/S_CTRL: OK
fail: v4l2-test-controls.cpp(624): did not check against size
test VIDIOC_G/S/TRY_EXT_CTRLS: FAIL
test VIDIOC_(UN)SUBSCRIBE_EVENT/DQEVENT: OK
test VIDIOC_G/S_JPEGCOMP: OK (Not Supported)
Standard Controls: 1 Private Controls: 10
Format ioctls:
test VIDIOC_ENUM_FMT/FRAMESIZES/FRAMEINTERVALS: OK
fail: v4l2-test-formats.cpp(1162): ret && node->has_frmintervals
test VIDIOC_G/S_PARM: FAIL
test VIDIOC_G_FBUF: OK (Not Supported)
test VIDIOC_G_FMT: OK
test VIDIOC_TRY_FMT: OK
test VIDIOC_S_FMT: OK
test VIDIOC_G_SLICED_VBI_CAP: OK (Not Supported)
test Cropping: OK (Not Supported)
test Composing: OK (Not Supported)
test Scaling: OK (Not Supported)
Codec ioctls:
test VIDIOC_(TRY_)ENCODER_CMD: OK (Not Supported)
test VIDIOC_G_ENC_INDEX: OK (Not Supported)
test VIDIOC_(TRY_)DECODER_CMD: OK (Not Supported)
Buffer ioctls:
test VIDIOC_REQBUFS/CREATE_BUFS/QUERYBUF: OK
test VIDIOC_EXPBUF: OK
Test input 0:
Total: 43, Succeeded: 41, Failed: 2, Warnings: 0
csi2_write:port 0 offset 0x00000218 val:0x00000000video4linux video0: frame start syncpt timeout!0 video4linux video0: frame start syncpt timeout!0 video4linux video0: frame start syncpt timeout!0 video4linux video0: frame start syncpt timeout!0
I think you can find the status REG from the TRM.
[ 239.488885] vi vi: TEGRA_CSI_CIL_STATUS 0x00000010External Media
Hi shaneccc,
mode0 {
};
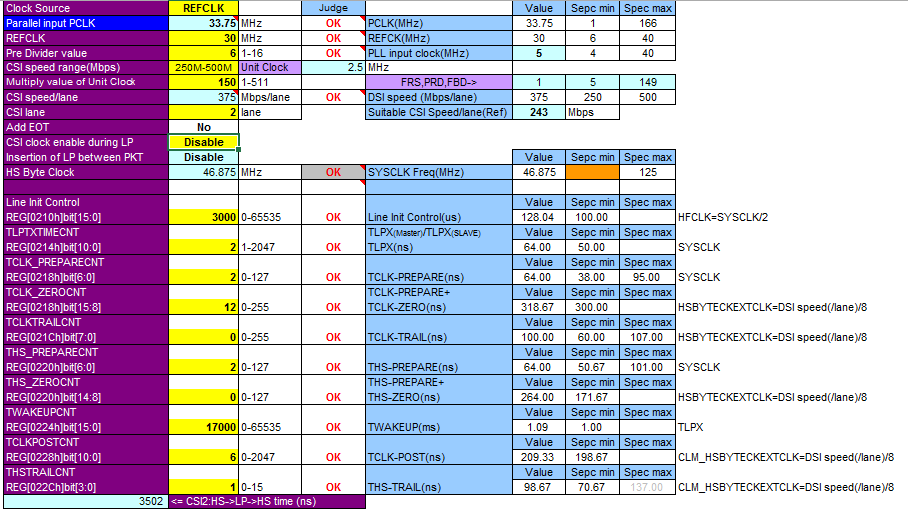
How do I set " pix_clk_hz"? Our sensor output clk is 33.75Mhz.That’s why I set " pix_clk_hz" as this value. And how do I set CSI-CLK frequency?
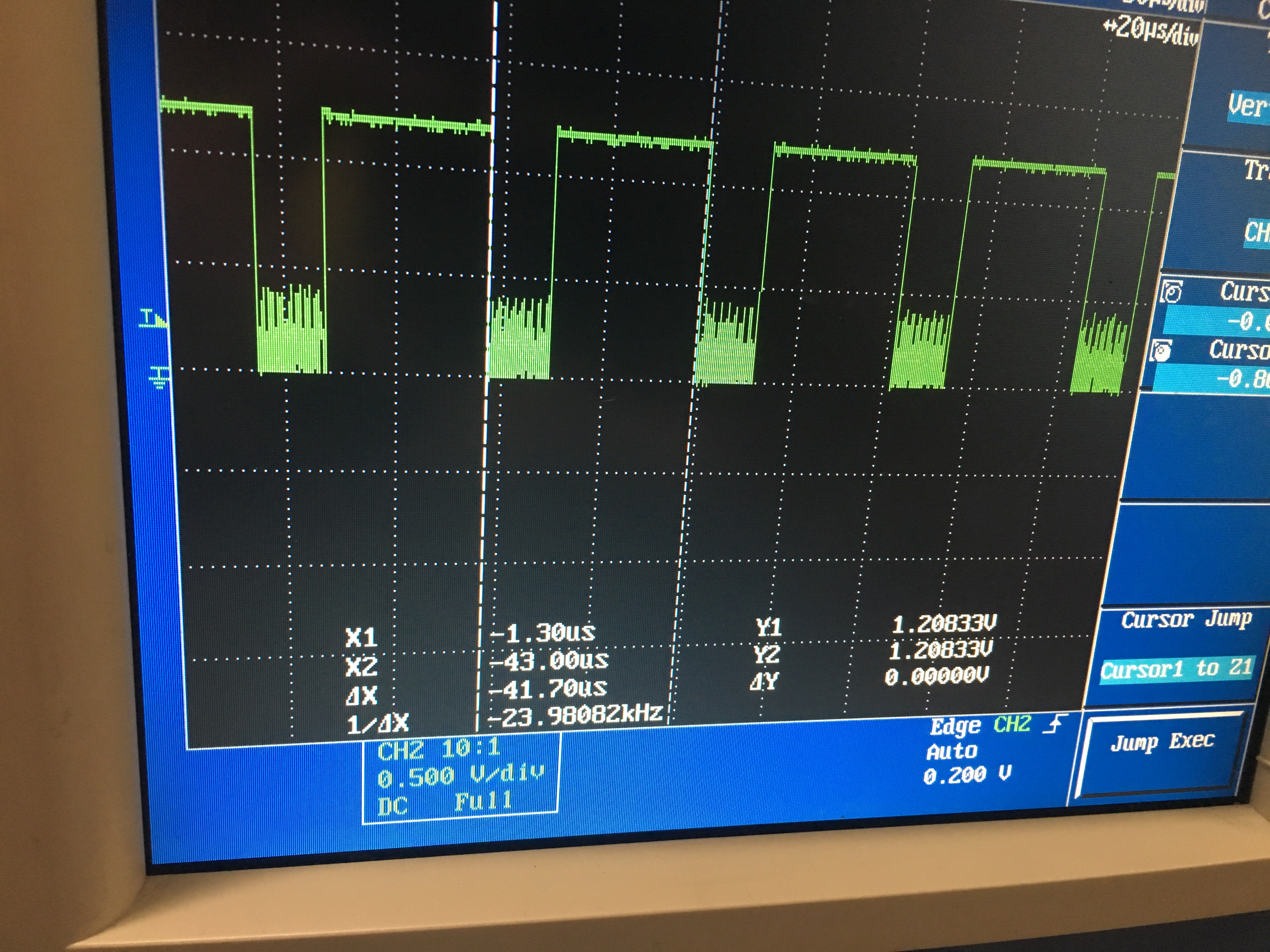
Does it means tx1 csi channel does not receive any MIPI package according to attachment Vn-Vp.jpg?
Hi Le0Nard0,
Could you share the Excel datasheet and driver code, which allows us to input some basic parameters of camera and generated some values used for TC358746 registers. I am debugging this IC for TX1 now.
My email address is cloundliu@163.com
thanks
@Le0Nard0
We have several toshiba chips working with TX1, let us know if you require additional help.
-David
Hi, David!
I have some problems with starting tc358748 to work in Parallel → CSI mode.